Franka Toolbox for MATLAB
The Franka Toolbox for MATLAB provides libraries and tools that integrate Franka robots with the MathWorks® software ecosystem.
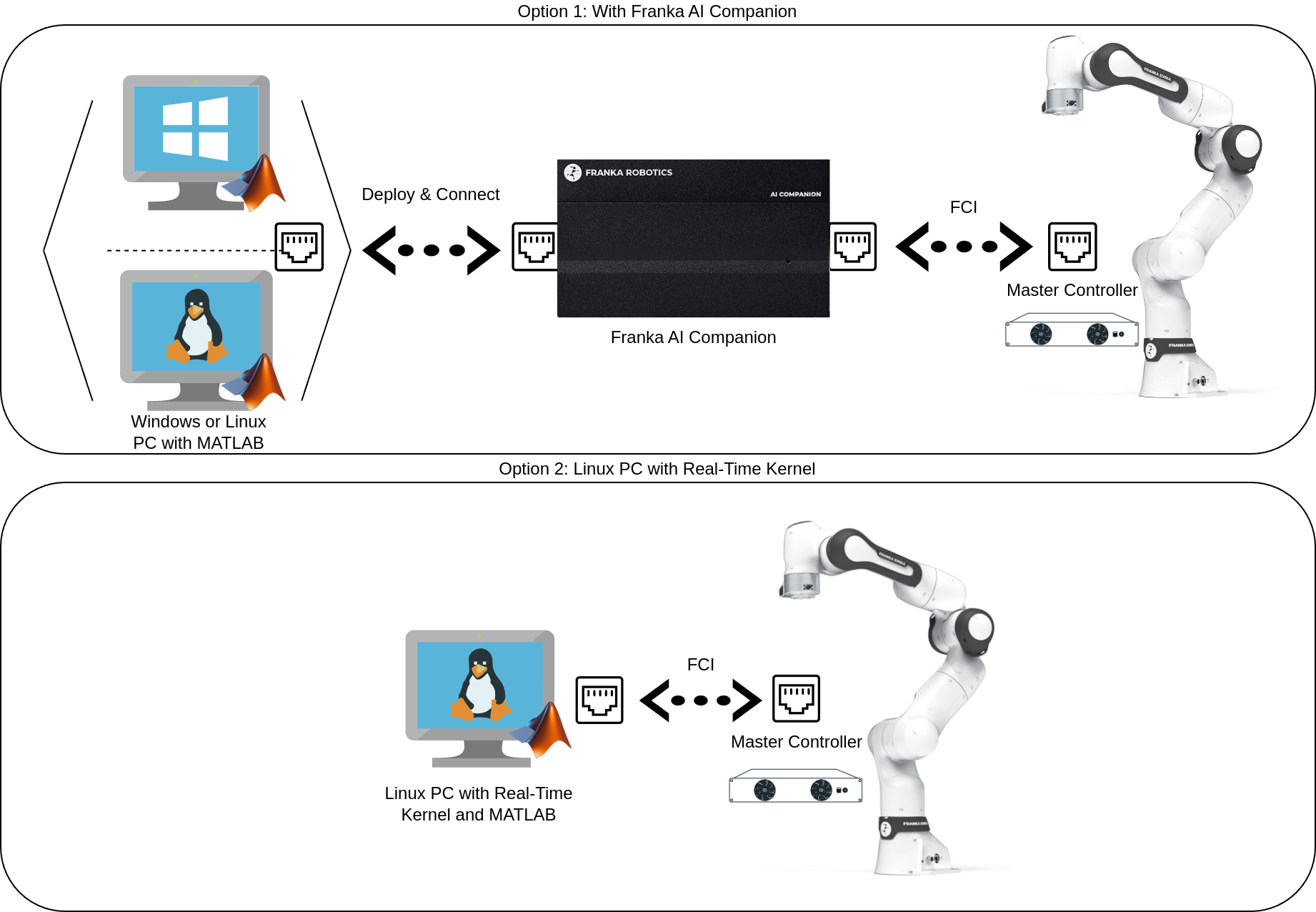
Hardware/Software configuration options for the Franka Toolbox for MATLAB.
The toolbox comprises two main components:
Franka Library for Simulink, a set of Simulink blocks for interfacing the Franka Robot through automatic C++ code gen with Simulink Coder. The library mainly aims at assisting with the rapid-development of advanced robot controllers.
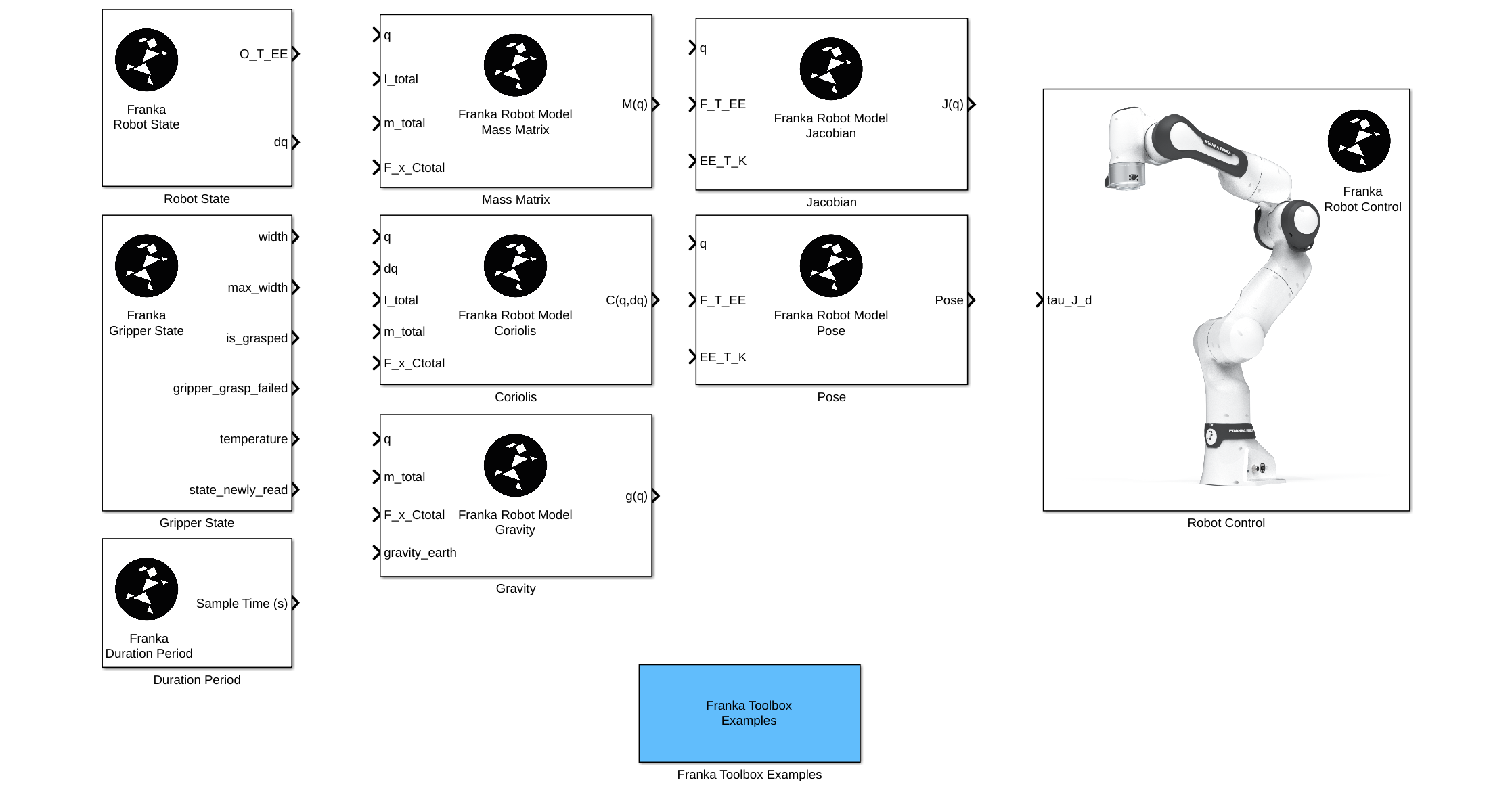
Simulink Library for rapid-prototyping of controllers for the Franka Robot.
Franka Library for MATLAB, which provides the FrankaRobot() MATLAB class for directly interfacing the Franka Robot.
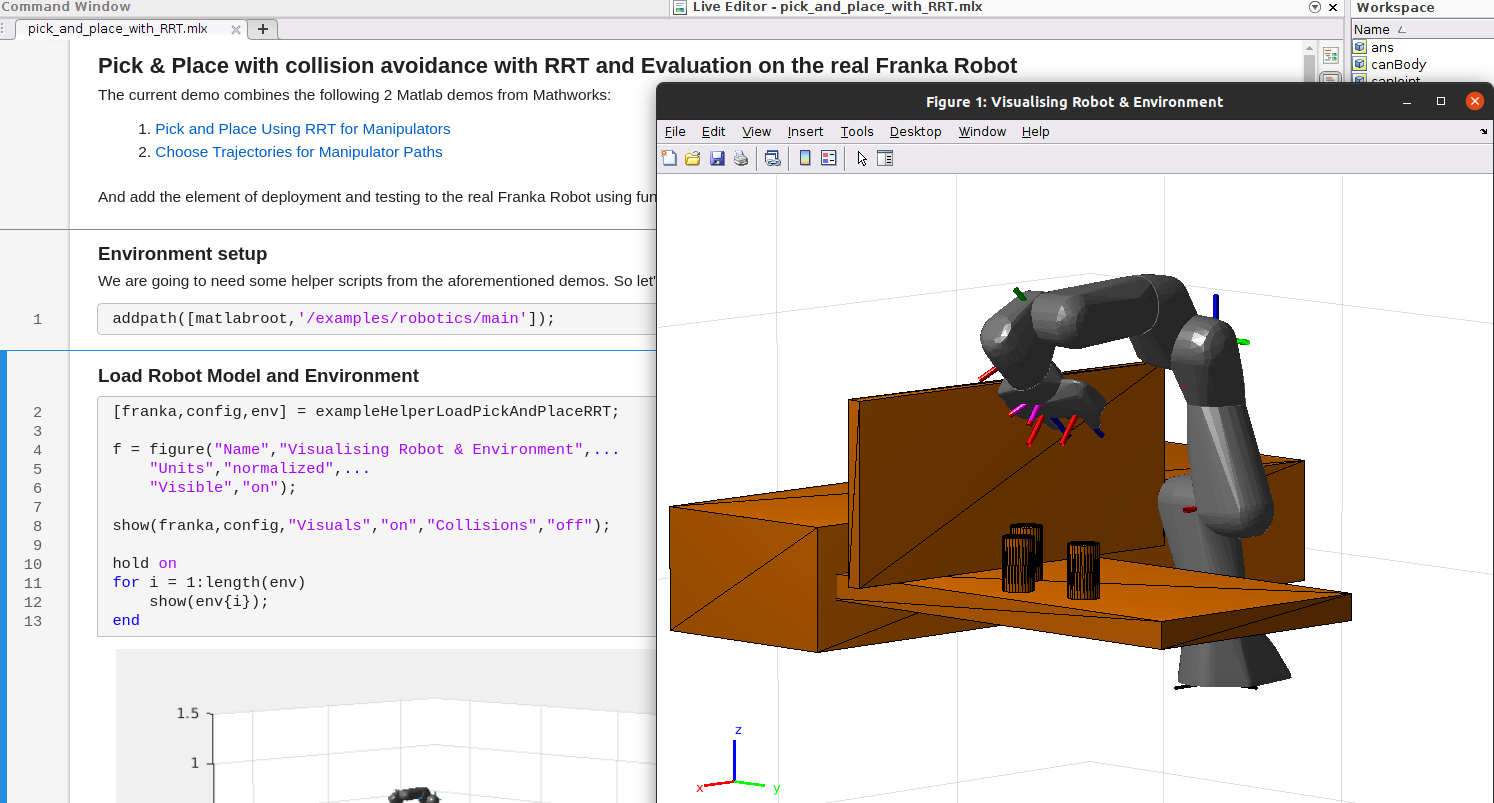
Example of a pick-and-place operation using RRT (Rapidly-exploring Random Tree) implemented in MATLAB Live Script.