Fanka Library for Simulink - Reference
Hint
Regarding the input/output signal nomenclature, datatypes, and sizes, the libfranka definitions have been fully adopted. You can find the complete list of signals here. The column-major format for signals has been adopted as well.
Robot Control
Robot Control Simulink Block.
This is the main block of the Franka Simulink Library. It is responsible for applying the desired robot parameters and control signals to the robot.
The robot settings can be applied through the block parameters.
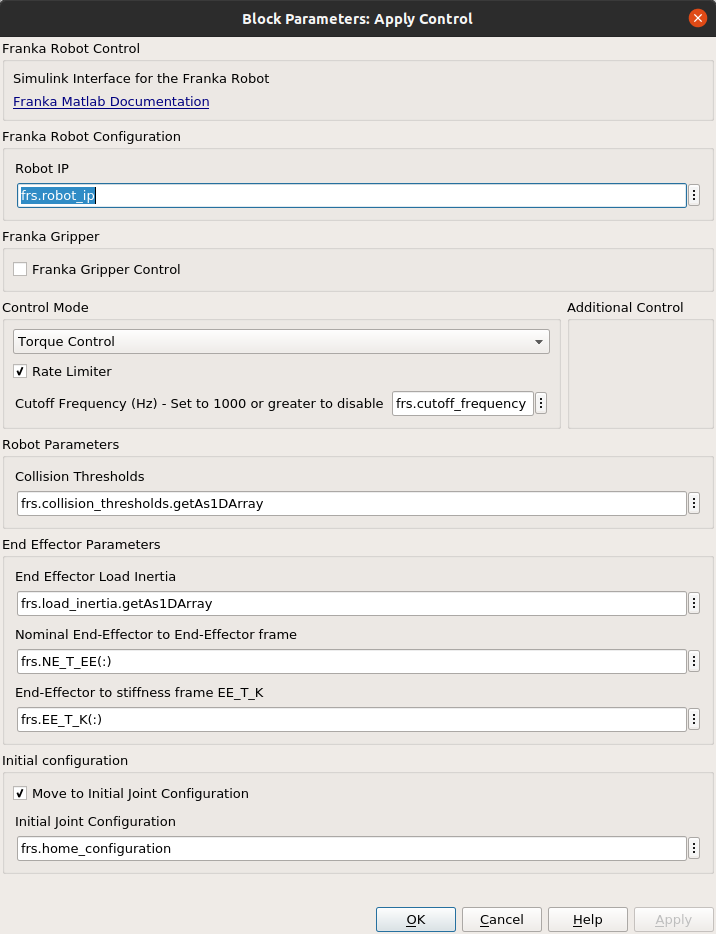
Robot Control Simulink Block Settings.
Hint
If desired, an initial robot configuration can be applied before the main execution of the control loop. Namely, the robot will move to the desired configuration and only then the main execution of the Simulink model will take place. You can define that in the Initial Configuration section of the block settings.
Robot State
Robot State Simulink Block.
For reading the desired set of signals stemming from the current robot state, you can free-type the names of the signals in the Parameters pane of the block parameters. For the set of available signals and their namings –> Robot State Attributes
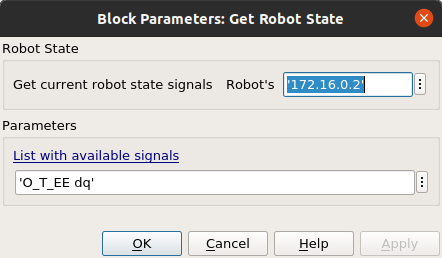
Get initial robot state Simulink Block Settings.
Duration Period
Get duration from last main callback(Sample Time) Simulink Block.
This Simulink block outputs the duration from the last execution step in seconds. Ideally this should be always 0.001 seconds but due to lost packages during communication errors 0.002 secs or 0.003 secs could be seen.
Warning
The step count of the Simulink model does not change during these communication mishaps. It continues to increment even though an execution step has been lost in reality. Therefore, special design considerations are necessary, especially for sensitive position motion generators. For example, refer to the generate_cartesian_pose_motion.slx demo to see how the main “clock” of the application has been designed.
Gripper State
Get current gripper state Simulink Block.
The gripper state block will inform the application about the current gripper state.
Hint
Highly recommended to have a look at the GripperState Struct Reference for the list of available signals and the demo grasp_objects.slx which is provided for getting started.
Mass Matrix
Get the Mass Matrix of the Robot Model.
Coriolis
Get the Coriolis Matrix of the Robot Model.
Gravity
Get the Gravity Vector of the Robot Model.
Jacobian
Get the Jabobian Matrix of the Robot.
You can select between “zero” or “body” Jacobian as well as the desired frame inside the block parameters.
Pose
Get the Robot Pose.
You can select the desired pose frame inside the block parameters.